
CSMA with Collision Detection
CSMA with Collision Detection
Persistent and non persistent CSMA protocols are clearly an improvement over ALOHA because they ensure that no station begins to transmit when it senses the channel busy. Another improvement is for stations to abort their transmissions as soon as they detect a collision. In other words, if two stations sense the channel to be idle and begin transmitting simultaneously, they will both detect the collision almost immediately. Rather than finish transmitting their frames, which are irretrievably garbled anyway, they should abruptly stop transmitting as soon as the collision is detected. Quickly terminating damaged frames saves time and bandwidth.
This protocol, known as CSMA/CD (CSMA with Collision Detection) is widely used on LANs in the MAC sublayer. In particular, it is the basis of the popular Ethernet LAN, so it is worth devoting some time to looking at it in detail. CSMA/CD, as well as many other LAN protocols, uses the conceptual model of Fig.5. At the point marked t0, a station has finished transmitting its frame. Any other station having a frame to send may now attempt to do so. If two or more stations decide to transmit simultaneously, there will be a collision. Collisions can be detected by looking at the power or pulse width of the received signal and comparing it to the transmitted signal.
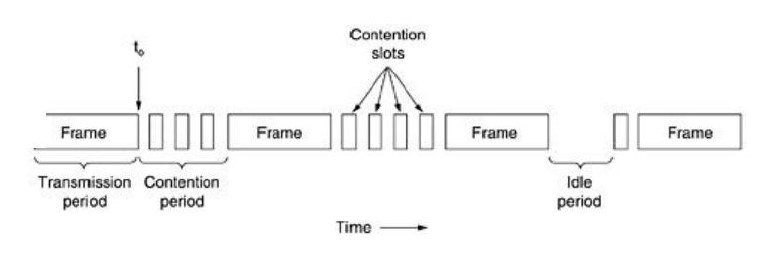
CSMA/CD can be in one of three states: contention, transmission, or idle
After a station detects a collision, it aborts its transmission, waits a random period of time, and then tries again, assuming that no other station has started transmitting in the meantime. Therefore, our model for CSMA/CD will consist of alternating contention and transmission periods, with idle periods occurring when all stations are quiet (e.g., for lack of work).
Now let us look closely at the details of the contention algorithm. Suppose that two stations both begin transmitting at exactly time t0. How long will it take them to realize that there has been a collision? The answer to this question is vital to determining the length of the contention period and hence what the delay and throughput will be. The minimum time to detect the collision is then just the time it takes the signal to propagate from one station to the other.
Based on this reasoning, you might think that a station not hearing a collision for a time equal to the full cable propagation time after starting its transmission could be sure it had seized the cable. By ''seized,'' we mean that all other stations knew it was transmitting and would not interfere. This conclusion is wrong. Consider the following worst-case scenario. Let the time for a signal to propagate between the two farthest stations be . At t0, one station begins transmitting. At , an instant before the signal arrives at the most distant station, that station also begins transmitting. Of course, it detects the collision almost instantly and stops, but the little noise burst caused by the collision does not get back to the original station until time . In other words, in the worst case a station cannot be sure that it has seized the channel until it has transmitted for without hearing a collision. For this reason we will model the contention interval as a slotted ALOHA system with slot width . On a 1-km long coaxial cable, . For simplicity we will assume that each slot contains just 1 bit. Once the channel has been seized, a station can transmit at any rate it wants to, of course, not just at 1 bit per sec.